map数据结构
Golang 的 map 使用哈希表作为底层实现,一个哈希表里可以有多个哈希表节点,也即bucket,而每个bucket就保存 了map中的一个或一组键值对。
map数据结构由 runtime/map.go/hmap 定义:
1
2
3
4
5
6
7
8
type hmap struct {
count int // 当前保存的元素个数
...
B uint8 // 指示bucket数组的大小
...
buckets unsafe.Pointer // bucket数组指针,数组的大小为2^B
...
}
下图展示一个拥有 4 个 bucket 的 map:
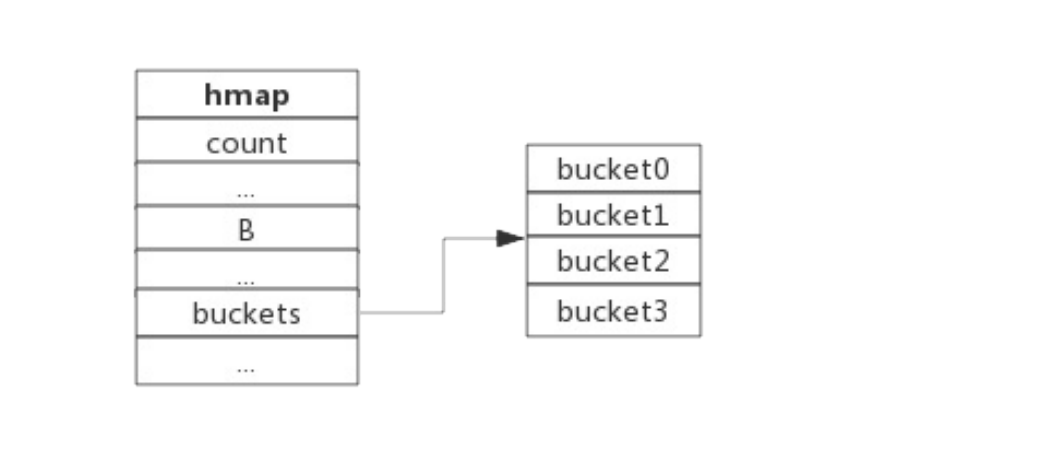
本例中, hmap.B=2 , 而 hmap.buckets 长度是 2^B为 4. 元素经过哈希运算后会落到某个bucket中进行存储。查找过程类似。
bucket 很多时候被翻译为桶,所谓的 哈希桶 实际上就是bucket。
bucket数据结构
bucket 数据结构由 runtime/map.go/bmap 定义:
1
2
3
4
5
type bmap struct {
tophash [8]uint8 //存储哈希值的高8位
data byte[1] //key value数据:key/key/key/.../value/value/value...
overflow *bmap //溢出bucket的地址
}
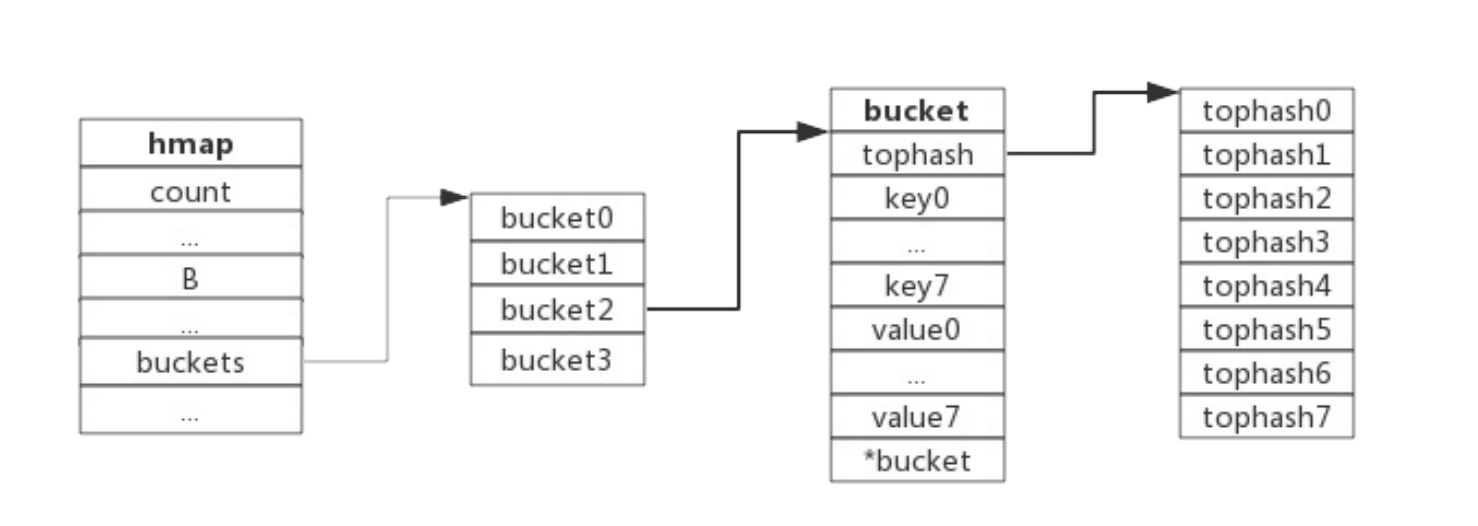
每个bucket可以存储8个键值对:
- tophash是个长度为8的数组,哈希值相同的键(准确的说是哈希值低位相同的键)存入当前bucket时会将哈希值的高位存储在该数组中,以方便后续匹配。
- data 区存放的是 key-value 数据,存放顺序是 key/key/key/…value/value/value,如此存放是为了节省字节对齐带来的空间浪费。
- overflow 指针指向的是下一个 bucket,据此将所有冲突的键连接起来。
注意:上述中 data 和 overflow 并不是在结构体中显示定义的,而是直接通过指针运算进行访问的。
下图展示 bucket 存放 8 个 key-value 对:
哈希冲突
当有两个或以上数量的键被哈希到了同一个bucket时,我们称这些键发生了冲突。Go使用链地址法来解决键冲突。由 于每个bucket可以存放8个键值对,所以同一个bucket存放超过8个键值对时就会再创建一个键值对,用类似链表的 方式将bucket连接起来。
下图展示产生冲突后的map:
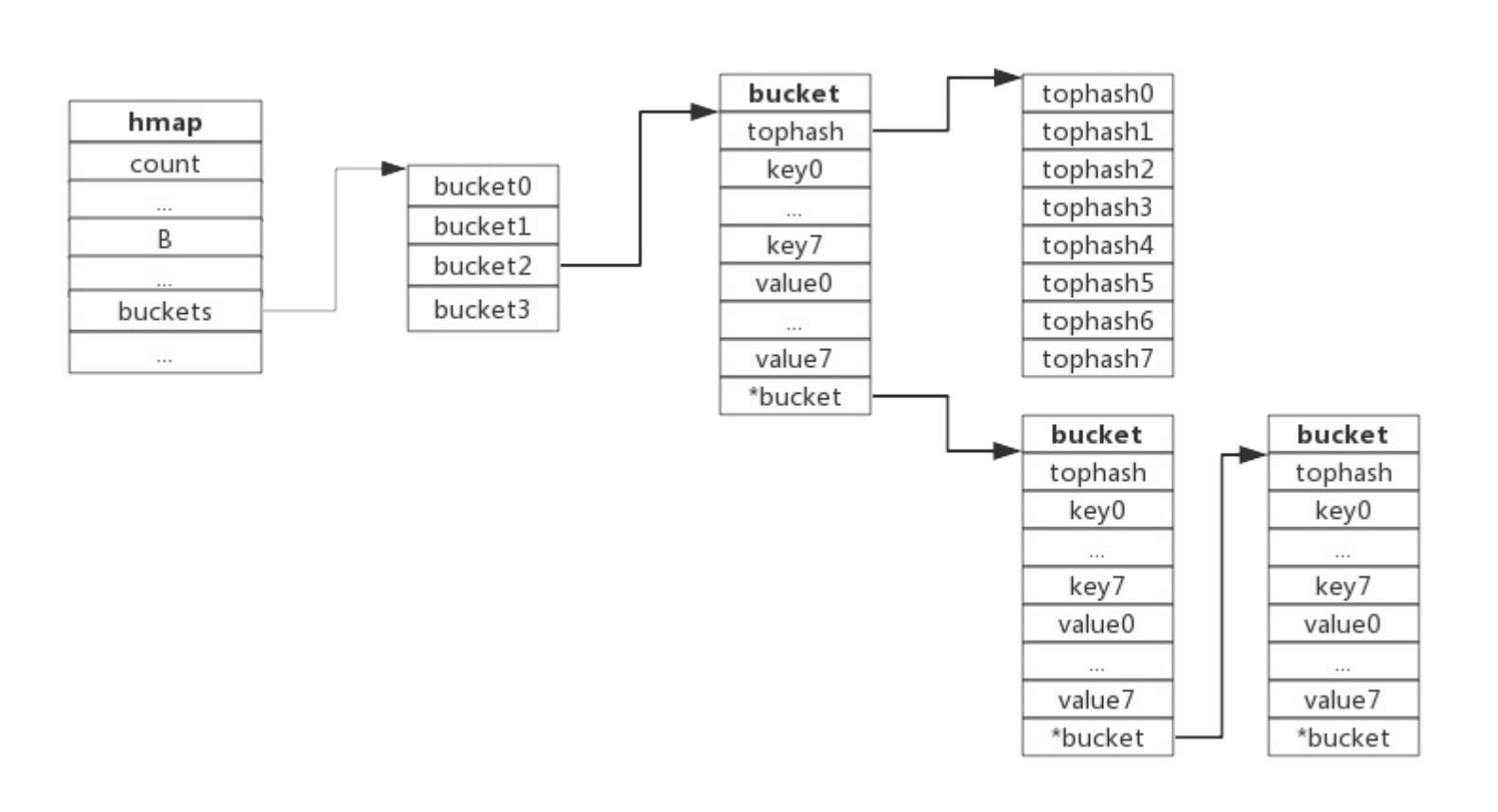 bucket数据结构指示下一个bucket的指针称为overflow bucket,意为当前bucket盛不下而溢出的部分。事实上 哈希冲突并不是好事情,它降低了存取效率,好的哈希算法可以保证哈希值的随机性,但冲突过多也是要控制的,后 面会再详细介绍。
bucket数据结构指示下一个bucket的指针称为overflow bucket,意为当前bucket盛不下而溢出的部分。事实上 哈希冲突并不是好事情,它降低了存取效率,好的哈希算法可以保证哈希值的随机性,但冲突过多也是要控制的,后 面会再详细介绍。
负载因子
负载因子用于衡量一个哈希表冲突情况,公式为:
1
负载因子 = 键数量/bucket数量
例如,对于一个 bucket 数量为 4,包含 4 个键值对的哈希表来说,这个哈希表的负载因子为 1.
哈希表需要将负载因子控制在合适的大小,超过其阀值需要进行 rehash,也即键值对重新组织:
- 哈希因子过小,说明空间利用率低
- 哈希因子过大,说明冲突严重,存取效率低
每个哈希表的实现对负载因子容忍程度不同,比如 Redis 实现中负载因子大于 1 时就会触发 rehash,而 Go 则在在负载 因子达到 6.5 时才会触发 rehash,因为 Redis 的每个 bucket 只能存 1 个键值对,而 Go 的 bucket 可能存 8 个键值对, 所以 Go 可以容忍更高的负载因子。
渐进式扩容
扩容的前提条件
为了保证访问效率,当新元素将要添加进map时,都会检查是否需要扩容,扩容实际上是以空间换时间的手段。触发扩容的条件有二个:
- 负载因子 > 6.5 时,也即平均每个 bucket 存储的键值对达到 6.5 个。
- overflow数量 > 2^15 时,也即 overflow 数量超过 32768 时。
增量扩容
当负载因子过大时,就新建一个 bucket,新的 bucket 长度是原来的 2 倍,然后旧 bucket 数据搬迁到新的 bucket。 考虑到如果 map 存储了数以亿计的 key-value,一次性搬迁将会造成比较大的延时,Go 采用逐步搬迁策略,即每次访问 map 时都会触发一次搬迁,每次搬迁 2 个键值对。
下图展示了包含一个 bucket 满载的 map(为了描述方便,图中 bucket 省略了 value 区域):
等量扩容
所谓等量扩容,实际上并不是扩大容量,buckets数量不变,重新做一遍类似增量扩容的搬迁动作,把松散的键值对 重新排列一次,以使bucket的使用率更高,进而保证更快的存取。在极端场景下,比如不断的增删,而键值对正好集 中在一小部分的bucket,这样会造成overflow的bucket数量增多,但负载因子又不高,从而无法执行增量搬迁的 情况,如下图所示:
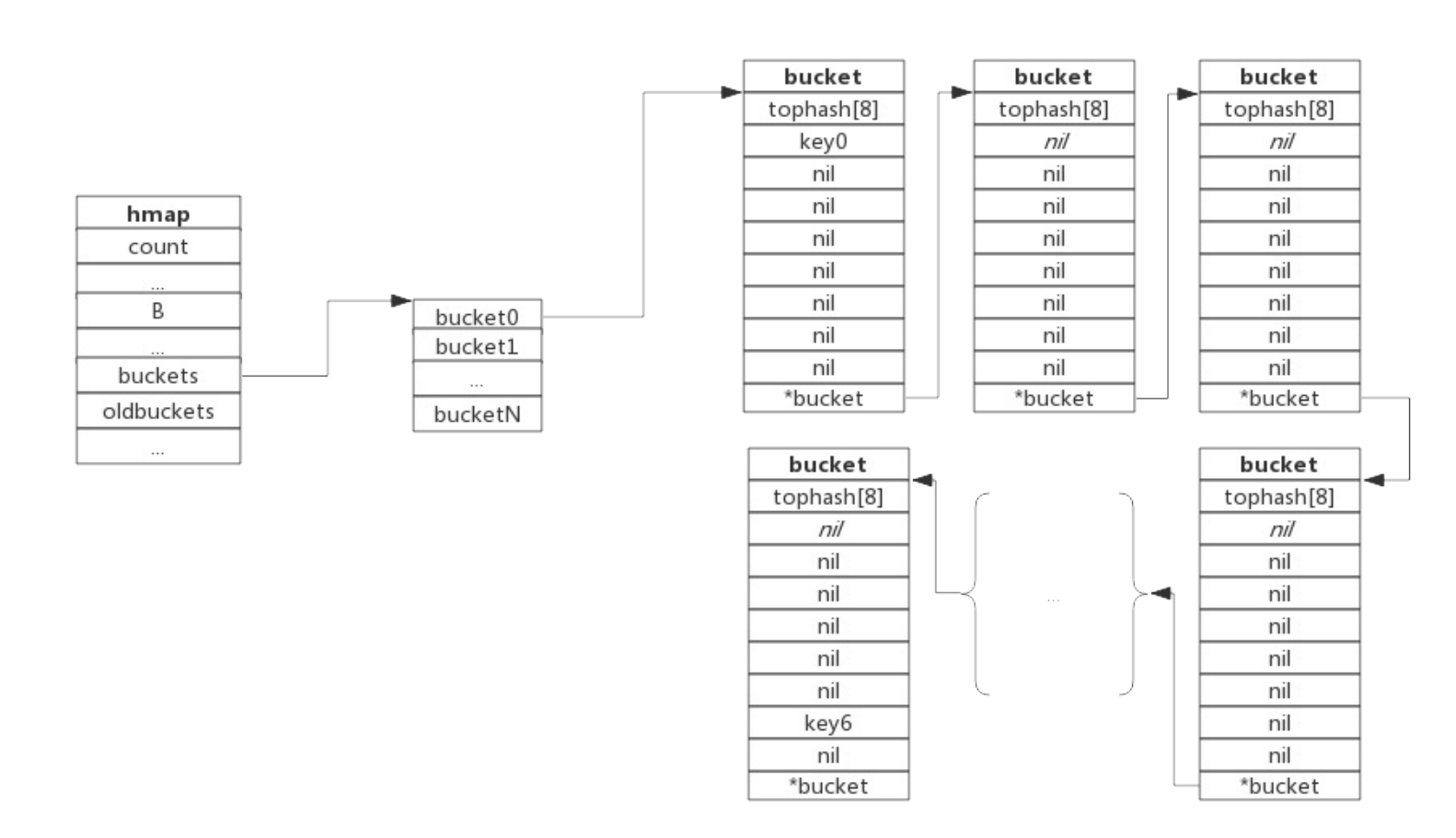 上图可见,overflow 的 buckt 中大部分是空的,访问效率会很差。此时进行一次等量扩容,即 buckets 数量不变, 经过重新组织后 overflow 的bucket 数量会减少,即节省了空间又会提高访问效率。
上图可见,overflow 的 buckt 中大部分是空的,访问效率会很差。此时进行一次等量扩容,即 buckets 数量不变, 经过重新组织后 overflow 的bucket 数量会减少,即节省了空间又会提高访问效率。
查找过程
查找过程如下:
- 跟据key值算出哈希值。
- 取哈希值低位与 hmpa.B 取模确定 bucket 位置。
- 取哈希值高位在tophash数组中查询。
- 如果tophash[i]中存储值也哈希值相等,则去找到该bucket中的key值进行比较。
- 当前bucket没有找到,则继续从下个overflow的bucket中查找。
- 如果当前处于搬迁过程,则优先从oldbuckets查找。
注:如果查找不到,也不会返回空值,而是返回相应类型的0值。
插入过程
新员素插入过程如下:
- 跟据key值算出哈希值
- 取哈希值低位与hmap.B取模确定bucket位置
- 查找该key是否已经存在,如果存在则直接更新值
- 如果没找到将key,将key插入。